Eptune Engineering Lda. is working together with its partners Spin.Works Lda. and The IPFN (Institute of Plasmas and Nuclear Fusion of the Technical Higher Institute) for the European Space Agency in the design of space probes with inflatable systems, the aim is to save significant amounts of fuel in the maneuver of entering into orbit missions destined for Mars and Venus , as well as making possible a new class of missions for exploring the outer solar system.
During the orbiting phase of an interplanetary probe (which concludes its journey to the target planet), it is typically necessary to reduce the probe’s velocity relative to the planet by several thousand kilometers per hour, a maneuver in which the use of rockets has been the only option since the dawn of space exploration. For some decades, however, we have been working on an alternative to achieve the same goal, called “aerocapture”. This technique consists of designing the arrival trajectory to include an atmospheric section, during which aerodynamic friction produces braking equivalent to that of the use of rockets, but without any fuel expenditure.
Although the outside of the probe is, in this case, subject to significant heat rates, the use of inflatable systems significantly reduces this heating, since it distributes it over a much larger area than the probe has in its normal configuration. The benefit of using this new technique is that the mass of the required inflatable system is, as a rule, is various orders of magnitude smaller than the fuel mass required to perform a similar maneuver.
The techniques that will be studied in this project include, in addition to aerocapture, another one already demonstrated throughout the history of space exploration, aerobraking (“aerobraking”).” Since 1993, some of the American and European missions have used their own solar panels as an aerodynamic brake in the atmospheres of Venus and Mars, in order to progressively reduce their orbit until they reach their final observation altitude – and by spending reduced amounts of fuel, in the image of the aerocapture. The problem that has worsened in recent years is that the configuration of these probes is not ideal to make the most of an aerobraking, since it has too small an area. As a result, the aerobraking periods of these missions tend to extend for several months (in the most recent case of the Exomars Trace Gas Orbiter mission, more than a year), which significantly delays the start of its operational mission.
It is therefore desirable, in the medium and long term future, to investigate the use of aerobraking and aerocapture technologies that allow artificially increasing (even if only temporarily) the dimensions of a probe, in order to accelerate its arrival in its final orbit.
That is the goal of the ISAA (Inflatable Systems for Aerobraking and Aerocapture) project, which fits into ESA’s Discovery & Preparation Programme.
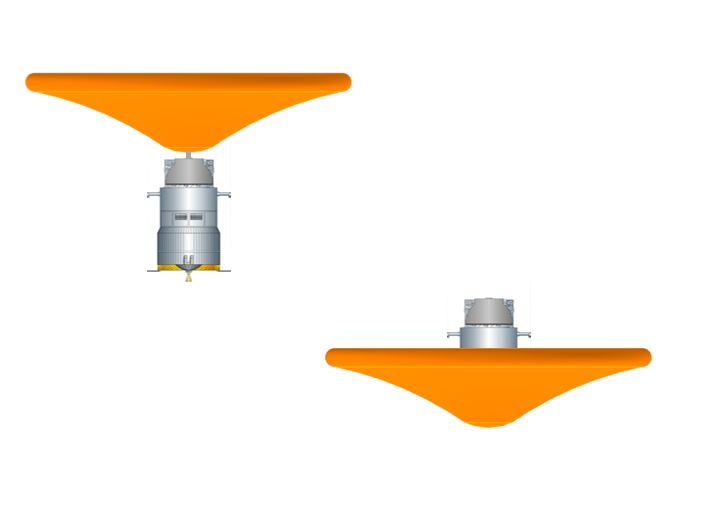
For this project will be designed inflatable systems that act as drag device during an aerocapture maneuver upon arrival on Mars and Venus respectively. In addition to the trajectory planning and conceptual design of the inflatable systems themselves, stabilisation and guidance control systems for the atmospheric and purely ballistic phases will also be designed, as well as the separation mechanisms of the inflatable component.
As test cases will be used the missions Earth Return Orbiter (the European contribution to the first mission of return of samples from the surface of Mars) and Envision (which, to be selected by ESA, will be the next European mission to Venus). To these will be added a third case, of aerocapture on Titan (a moon of Saturn with the potential to contain an ocean of liquid water beneath its surface). The atmosphere surrounding this particular moon, given its length of several hundred kilometers, represents one of the most “benign” cases for the demonstration of the aerocapture technique, and its use in this case could open doors to the execution of small missions to the Saturn system, something that appears itself as a small revolution in robotic space exploration.